- English
- Español
- Português
- русский
- Français
- 日本語
- Deutsch
- tiếng Việt
- Italiano
- Nederlands
- ภาษาไทย
- Polski
- 한국어
- Svenska
- magyar
- Malay
- বাংলা ভাষার
- Dansk
- Suomi
- हिन्दी
- Pilipino
- Türkçe
- Gaeilge
- العربية
- Indonesia
- Norsk
- تمل
- český
- ελληνικά
- український
- Javanese
- فارسی
- தமிழ்
- తెలుగు
- नेपाली
- Burmese
- български
- ລາວ
- Latine
- Қазақша
- Euskal
- Azərbaycan
- Slovenský jazyk
- Македонски
- Lietuvos
- Eesti Keel
- Română
- Slovenski
- मराठी
- Srpski језик

Mis on BYD puhta elektri tase?
2023. aastal pääses BYD esimest korda maailma 10 parima autotootja hulka oma müügirekordiga 3,02 miljonit ühikut ning on ka tänane ülemaailmne liider uute energiasõidukite vallas. Paljud inimesed arvavad, et BYDi edu on seotud ainult DM-i-ga ja et BYD ei tundu puhtas EV segmendis väga konkurentsivõimeline. Kuid eelmisel aastal müüdi BYDi puhtaid elektrilisi sõiduautosid rohkem kui pistikühendusega hübriide, mis näitab, et enamik tarbijaid tunneb ära ka BYDi puhtad elektrilised tooted.
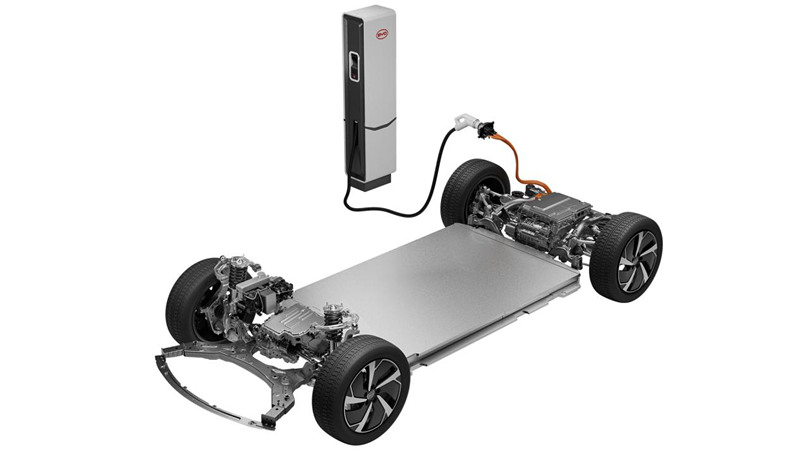
Kui rääkida puhastest elektrisõidukitest, siis peame mainima BYDi e-platvormi. Pärast 14 aastat kestnud iteratiivseid uuendusi on BYD arenenud algsest e-platvormist 1.0 platvormiks e-platvorm 3.0 ja toonud sellel platvormil turule enimmüüdud puhtalt elektrilised mudelid, nagu Dolphin ja Yuan PLUS. Hiljuti tõi BYD turule uuendatud e-platvormi 3.0 Evo, et tulla toime tiheda konkurentsiga puhta elektrituruga. Milline on BYD puhta elektritehnoloogia tase Hiina uute energiasõidukite liidrina?

Kõigepealt tuleb märkida, et erinevalt selliste platvormide kontseptsioonist nagu Volkswageni MQB, ei viita BYDi e-platvorm mitte modulaarsele šassiile, vaid BYD-i aku, mootori ja elektroonilise juhtimistehnoloogia üldisele terminile. Esimene mudel, mis võttis kasutusele e-platvormi 1.0 kontseptsiooni, oli 2011. aastal turule toodud BYD e6. Kuid sel ajal olid elektrisõidukid kogu maailmas lapsekingades, mitte ainult ei olnud naeruväärselt kallid, vaid ka inimesed olid väga mures selle pärast. elektrisõidukite vastupidavus. Seetõttu olid tolleaegsed elektrisõidukid suunatud takso- ja bussiturgudele ning sõltusid äärmiselt valitsuse toetustest.

Võib öelda, et e-platvormi 1.0 sünd on tarbesõidukite suure intensiivsusega ja suure koguläbisõidu nõuete täitmine. BYD ees seisev probleem seisneb selles, kuidas parandada aku kasutusiga. Nagu me kõik teame, on akul kaks kasutusiga: [tsükkel] ja [kalender]. Esimene seisneb selles, et aku mahutavus väheneb vastavalt laadimiste ja tühjenemiste arvu suurenemisel; samas kui kalendri kasutusiga on see, et aku võimsus aja jooksul loomulikult väheneb. E-platvormi 1.0 mudeli põhjal on selle kalendriline eluiga 10 aastaga vähenenud 80%-ni aku mahust ning tsikli eluiga on 1 miljon kilomeetrit, mis mitte ainult ei vasta tarbesõidukite vajadustele, vaid loob ka hea maine BYD jaoks.

Hiina elektrisõidukite tööstuse järkjärgulise kasvuga on akude ja muude komponentide hind aasta-aastalt langenud ning poliitika on suunanud elektrisõidukite populariseerimist kodumajapidamiste turule, mistõttu BYD käivitas 2018. aastal e-platvormi 2.0. Kuna e-platvorm 2.0 on mõeldud peamiselt koduautode turule, on kasutajad väga tundlikud auto ostmise kulude suhtes, seega on e-platvormi 2.0 tuum kulude kontrolli all hoidmine. Selle nõudmise tõttu hakkas e-platvorm 2.0 kasutusele võtma kolm-ühes elektriajami, laadimis- ja jaotusseadme ning muude komponentide integreeritud disaini ning käivitas erinevate mudelite jaoks modulaarse disaini, mis vähendas kogu sõiduki maksumust. .

Esimene e-platvormil 2.0 põhinev mudel oli 2018. aastal turule toodud Qin EV450 ning seejärel sündisid platvormil Song EV500, Tang EV600 ja Han EV mudelid. Tasub mainida, et e-platvormi 2.0 mudelite kumulatiivne müük ulatus samuti 1 miljonini, võimaldades BYD-l edukalt vabaneda sõltuvusest puhastest elektritaksodest ja -bussidest.


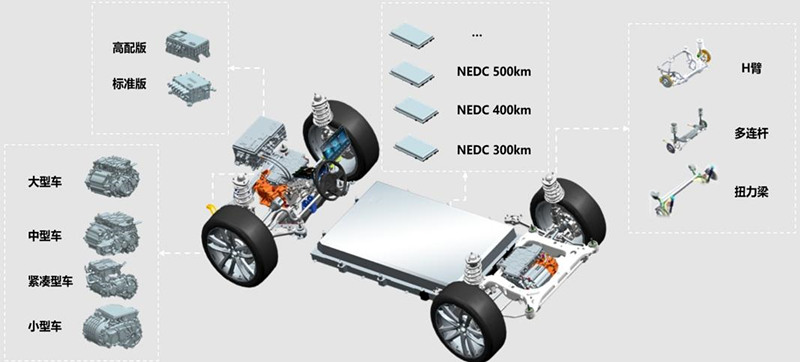
2021. aastal, kodumaise uue energiaturu sisemise mahu tihenedes, peab elektrisõiduk olema mitte ainult hinna poolest konkurentsivõimeline, vaid saavutama saavutusi ka ohutuse, kolmevõimsuse, aku tööea ja ühtlase juhitavuse osas. Seetõttu tõi BYD turule e-platvormi 3.0. Võrreldes eelmise põlvkonna tehnoloogiaga kasutas BYD integreeritumat 8-ühes elektriajamisüsteemi, mis vähendas veelgi elektriajamisüsteemi kaalu, mahtu ja maksumust, samas kui tehnoloogiad, nagu labaakud, soojuspumbasüsteemid ja CTB kered parandasid tõhusalt elektrisõidukite aku kasutusaega, sõidukogemust ja ohutust.

Turu tagasiside osas vastas e-platvorm 3.0 samuti ootustele. Dolphin, Seagull, Yuan PLUS ja muud sellel platvormil ehitatud mudelid pole mitte ainult muutunud BYD müügisambaks, vaid ka eksportinud paljusid välisturgudele. Puhta elektrisõiduki platvormi pideva uuendamise kaudu on BYD elektrisõidukid saavutanud hinna, jõudluse ja energiatarbimise osas väga suurepärase taseme ning neid tunnustab ka turg.


Traditsiooniliste tootjate ja uute autotootjate vooluga elektrisõidukite rajale tuleb Hiinas iga paari kuu tagant müügile kassahitt elektrisõidukeid ning erinevaid tehnilisi näitajaid värskendatakse pidevalt. Selles keskkonnas tunneb BYD loomulikult survet. Puhtalt elektrilisel rajal liidripositsiooni jätkamiseks andis BYD selle aasta 10. mail ametlikult välja e-platvormi 3.0 Evo ning rakendas selle esmalt Sea Lion 07EV-le. Erinevalt eelmistest platvormidest on e-platvorm 3.0 Evo puhtalt elektrisõidukite platvorm, mis on välja töötatud globaalse turu jaoks ning mille ohutus, energiakulu, laadimiskiirus ja võimsus on oluliselt paranenud.

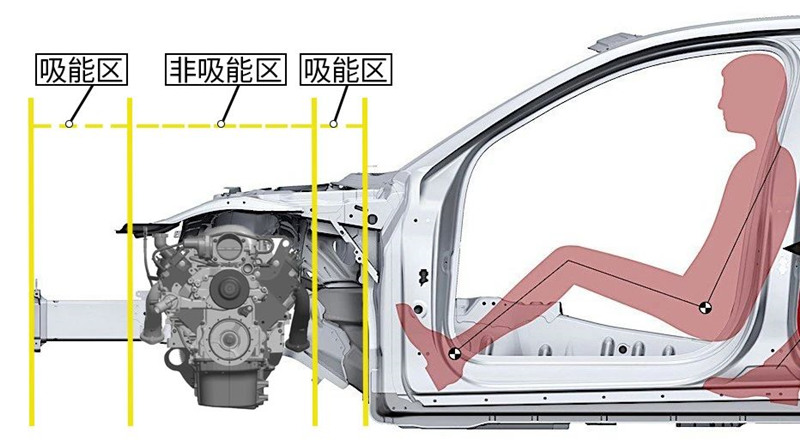
Kui rääkida autokerega kokkupõrgete ohutusest, siis võib esimese asjana pähe tulla materjali tugevus, konstruktsioonikujundus jne. Lisaks sellele on kokkupõrkeohutus seotud ka auto esiosa pikkusega. Ühesõnaga, mida pikem on auto esiosa energia neeldumistsoon, seda parem on reisijate kaitse. Kuid esiajamiga mudelitel kuulub elektrisüsteemi suurte mõõtmete ja suure tugevuse tõttu piirkond, kus elektrisüsteem asub, mitteenergia neeldumistsooni, seega tervikuna on eesmise energia neeldumise vaheline kaugus. tsoon väheneb.
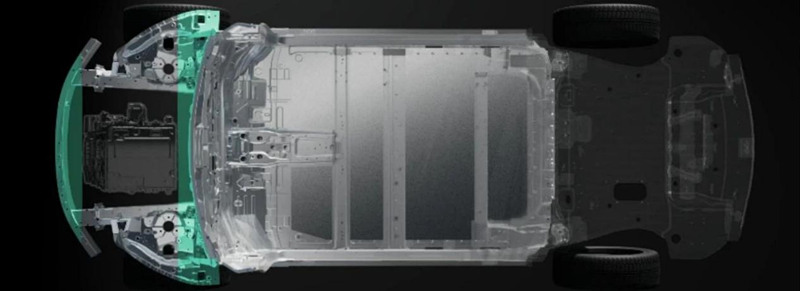
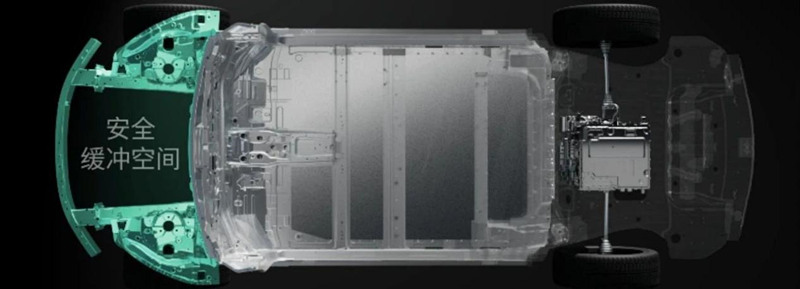
Üles: eesmine eesmine ajam/alla: tagumine tagaajam
E-platvormi 3.0 Evo erinevus seisneb selles, et see keskendub tagaveole ehk algselt mitteenergiat neelavasse tsooni kuulunud jõuallika liigutamisele tagasillale, nii et ees on rohkem ruumi. auto energiat neelavat tsooni, parandades sellega laupkokkupõrgete ohutust. Loomulikult on e-platvormil 3.0 Evo ka nelikveoline versioon, mis on varustatud esi- ja tagamootoritega, kuid esimootori nelikveolise versiooni võimsus ja maht on suhteliselt väikesed, mis ei mõjuta auto esiosa energiat neelav tsoon.
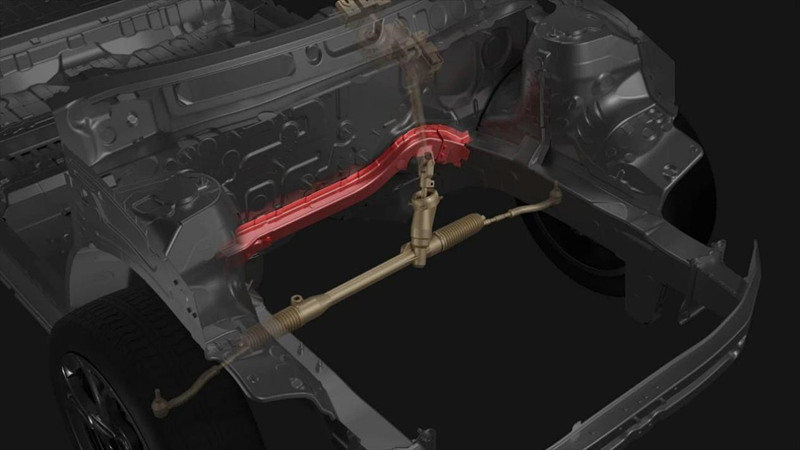
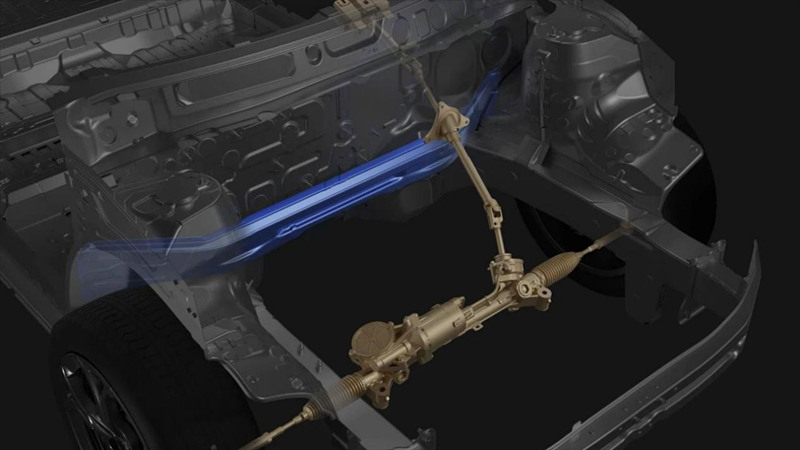
Üles: tagarool/alla: esirool
Rooliseadme paigutuse osas võtab e-platvorm 3.0 Evo kasutusele esirooli, see tähendab, et roolimehhanism on paigutatud esiratta esiküljele, samal ajal kui eelmisel e-platvormil 3.0 on enamiku mudelite roolimehhanism. välja arvatud see, et SEAL on paigutatud esiratta tagaküljele. Selle konstruktsiooni põhjuseks on peamiselt see, et tagaroolitava sõiduki puhul häirib roolimisnöör eesmise hoidiku (üldtuntud kui tulemüür) alumist valgusvihu ja tala tuleb rooli asendis mulgustada või painutada. string, mille tulemuseks on jõu ebaühtlane ülekandmine talalt. Eesmise roolikonstruktsiooni korral ei sega roolinöör tala, tala struktuur on tugevam ja jõuülekanne mõlemal kehapoolel ühtlasem.
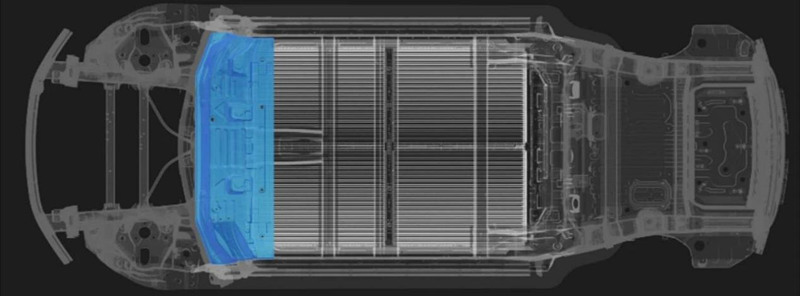
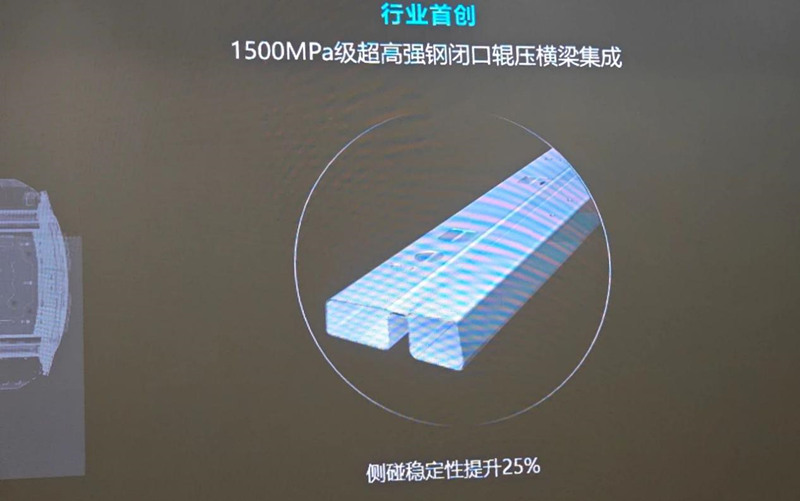
Lõpuks kasutab uus platvorm endiselt CTB kere aku integreerimise tehnoloogiat, šassii keskel olev topelttala on suletud struktuuriga ja tala terasest tugevus ulatub 1500 MPa-ni. Tavaliste külgkokkupõrgete korral või reageerimisel E-NCAP külgsamba kokkupõrgetele saavad salongis viibivad reisijad ja šassii all olevad akud paremini kaitsta. Tänu sellistele tehnoloogiatele nagu tagumine ajam, esirool, integreeritud esipiirded ja CTB, vähenes e-platvormiga 3.0 Evo mudeli keskmine aeglustus C-NCAP esikokkupõrke testis 25 grammile, samas kui valdkonna keskmine oli 31 grammi. Mida väiksem on g väärtus, seda parem on sõiduki energia neeldumisefekt. Sõitjateruumi tungimise osas on 3.0 Evo mudeli pedaali tungimine alla 5 mm, mis on samuti suurepärane tase.

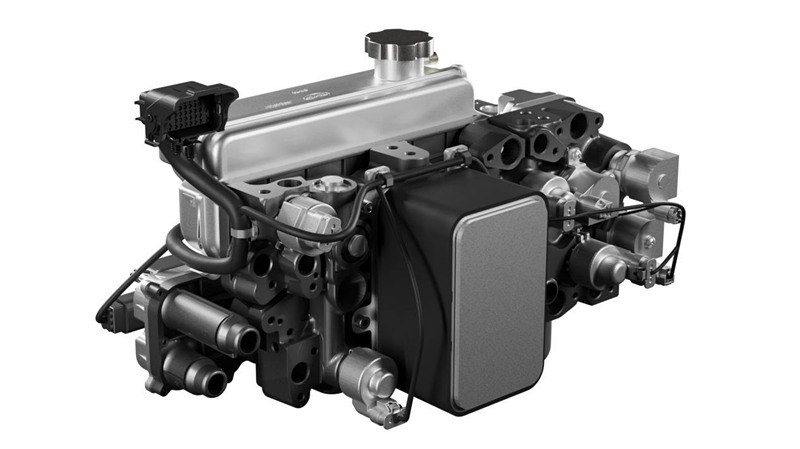
Energiatarbimise juhtimise osas on e-platvormi 3.0 Evo ideeks kasutada integreeritumat elektriajamisüsteemi. Elektrisõidukite puhul, mida suurem on üldsüsteemi integreeritus, seda vähem on erinevate komponentide vahel ühendustorusid ja juhtmestikke ning seda väiksem on süsteemi maht ja kaal, mis aitab vähendada kogu sõiduki kulusid ja energiatarbimist. .
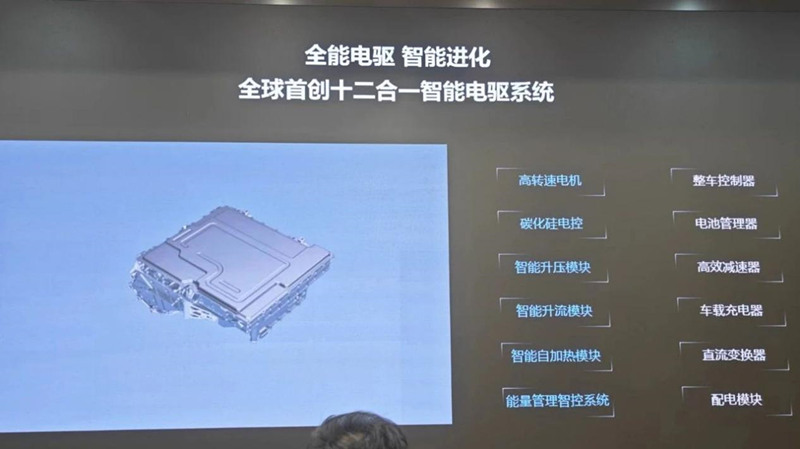
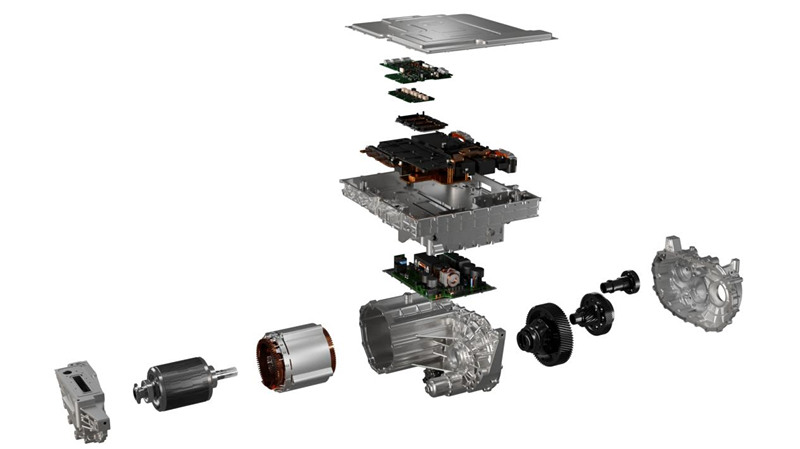
E-platvormil 2.0 tõi BYD esimest korda turule kolm-ühes elektriajamisüsteemi ja 3.0 uuendati 8-ühes versiooniks. Tänapäeva 3.0 Evo kasutab 12-ühes disaini, mis teeb sellest tööstuse kõige integreerituma elektriajamisüsteemi.

Mootoritehnoloogia osas on e-platvormil 3.0 Evo kasutusel 23000 p/min püsimagnetmootor ja see on paigaldatud Sea Lion 07EV-le, mis on praegusel etapil kõrgeim masstoodanguna toodetud mootorid. Suure kiiruse eeliseks on see, et mootor suudab end konstantse võimsuse eeldusel väiksemaks muuta, parandades nii mootori "võimsustihedust", mis aitab ka elektrisõidukite energiatarbimist vähendada.
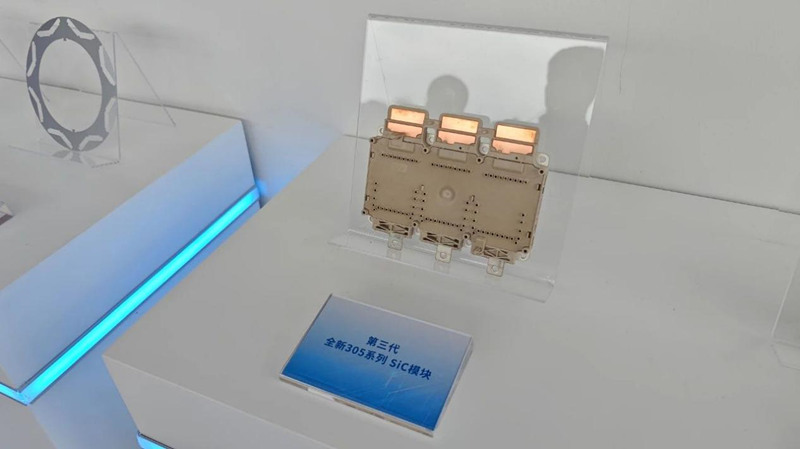
Elektroonilise juhtimisdisaini osas võttis BYD Han EV juba 2020. aastal kasutusele ränikarbiidist ränikarbiidi jõuseadmed, mis teeb sellest esimese kodumaise tootja, kes selle tehnoloogia vallutab. Tänane e-platvorm 3.0 Evo on täielikult populariseerinud BYDi kolmanda põlvkonna ränikarbiidi ränikarbiidi jõuseadme.
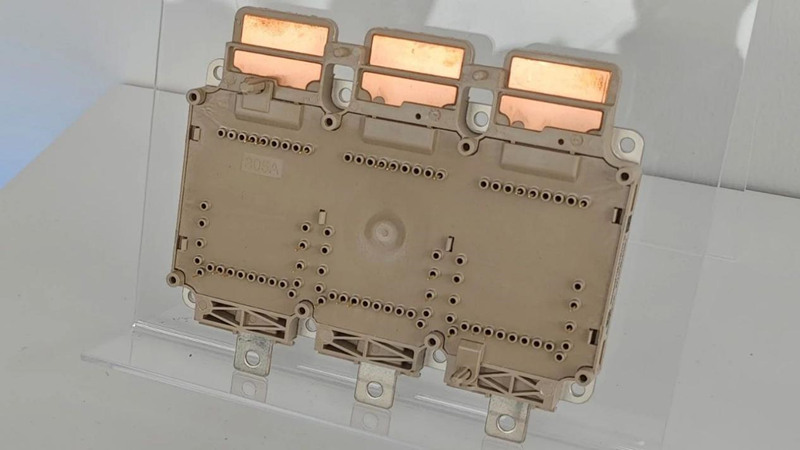
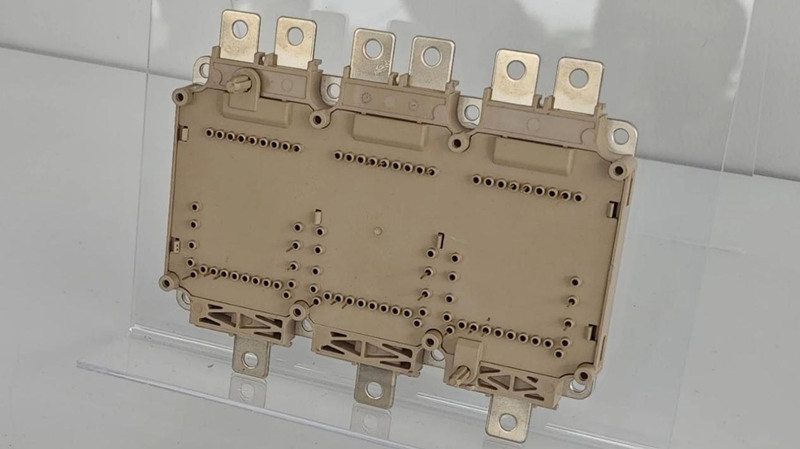
Ülemine: lamineeritud laserkeevitus/alumine: puhas poltühendus
Võrreldes olemasoleva tehnoloogiaga on kolmanda põlvkonna ränikarbiidi maksimaalne tööpinge 1200 V ja lamineeritud laserkeevituse pakkimisprotsess on kasutusele võetud esimest korda. Võrreldes eelmise puhta poltidega kinnitamise protsessiga, on lamineeritud laserkeevituse parasiitne induktiivsus vähenenud, vähendades seega selle enda energiatarbimist.
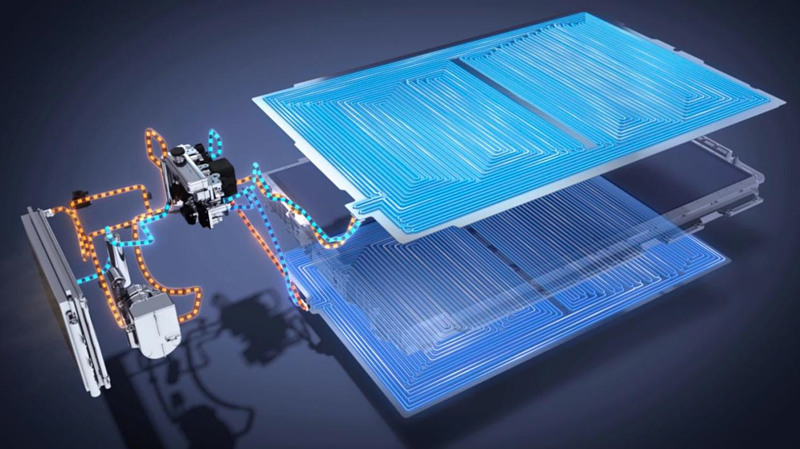
Algsel e-platvormil 3.0 soojuspumbasüsteemil + külmutusagensi otsejahutusel põhinev uus platvorm on aku soojuse hajumist rohkem optimeerinud. Näiteks algsel külmplaadil, mis hajutab soojust akule, puudub vahesein ja külmutusagens voolab otse aku esiosast aku tagaossa, nii et aku esiosa temperatuur on madalam, samas kui taga asuva aku temperatuur on kõrgem ja soojuse hajumine ei ole ühtlane.
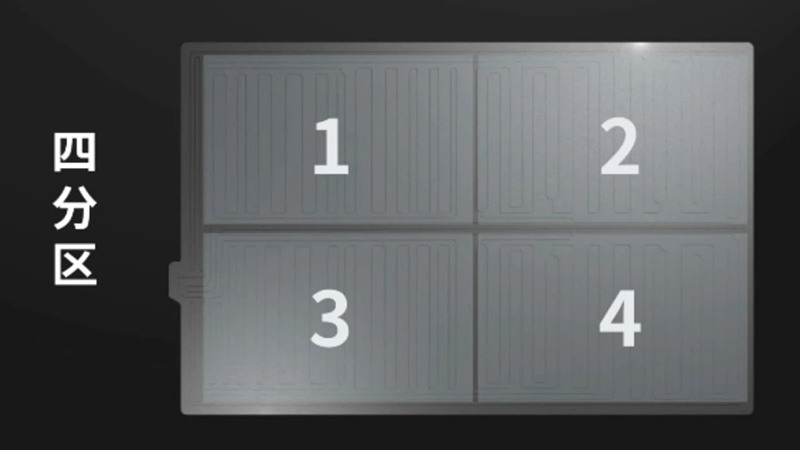
3.0 Evo jagab aku külmplaadi neljaks eraldi piirkonnaks, millest igaüht saab vastavalt vajadusele jahutada ja soojendada, mille tulemuseks on ühtlasem aku temperatuur. Tänu uuendustele mootoris, elektroonilises juhtimises ja soojusjuhtimises on sõiduki kasutegur linnatingimustes keskmisel ja madalal kiirusel suurenenud 7% ning sõiduulatust on suurendatud 50 km võrra.


Tänapäeval on elektrisõidukite laadimiskiirus paljude kasutajate jaoks endiselt valupunkt. Kuidas tankimiskiirusel kütusega sõidukitele järele jõuda, on suuremate elektrisõidukite tootjate jaoks kiireloomuline probleem. Eriti põhja pool, kuna aku elektrolüütide juhtivus langeb madala temperatuuriga keskkonnas kiiresti, väheneb talvel elektrisõidukite laadimiskiirus ja sõiduulatus oluliselt. Võtmeks saab, kuidas aku kiiresti ja tõhusalt õige temperatuurini soojendada.

E-platvormil 3.0 Evo on aku küttesüsteemil kolm soojusallikat: soojuspumba konditsioneer, ajamimootor ja aku ise. Soojuspumbaga konditsioneerid on kõigile tuttavad ning õhuenergiaga veesoojendites ja -kuivatites on palju rakendusi, seega ei hakka siinkohal detailidesse laskuma.
Mootori kütmine, mis kõiki rohkem huvitab, on mootori mähise takistuse kasutamine soojuse tekitamiseks ning seejärel suunatakse mootoris jääksoojus läbi 16-in-1 soojusjuhtimismooduli akusse.
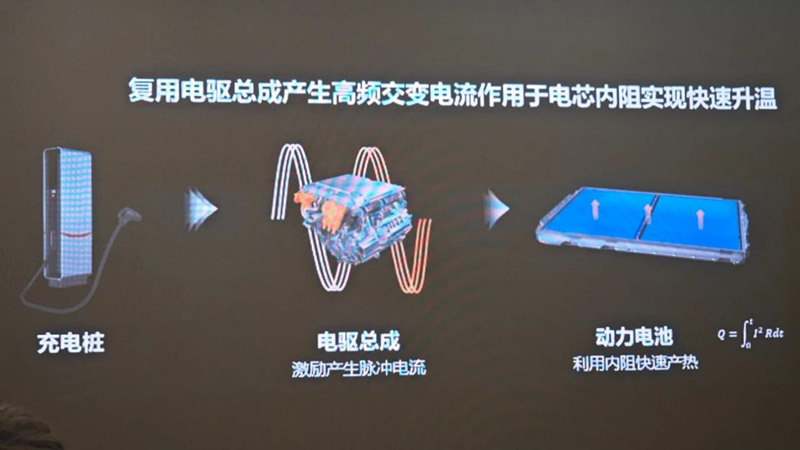
Mis puutub aku soojuse tootmise tehnoloogiasse, siis Denza N7 puhul on see aku impulssküte. Lihtsamalt öeldes on akul endal kõrge sisetakistus madalatel temperatuuridel ja aku tekitab voolu läbimisel paratamatult soojust. Kui akupakett on jagatud kahte rühma, A ja B, kasutage tühjenemiseks ja seejärel B laadimiseks rühma A ning seejärel tühjendage rühma B omakorda laadimisrühma A. Seejärel laadige kahe akurühma madalal tasemel kõrge sagedusega üksteisega, aku kuumeneb kiiresti ja ühtlaselt. Kolme soojusallika abil on e-platvormi 3.0 Evo mudeli talvine sõiduulatus ja laadimiskiirus parem ning seda saab normaalselt kasutada ka ülikülmas keskkonnas miinus -35 °C.

Toatemperatuuril laadimise kiiruse osas on e-platvorm 3.0 Evo varustatud ka pardal oleva võimendus-/võimendusfunktsiooniga. Boosti roll on kõigile tuttav, kuid BYDi tõuge võib teistest mudelitest mõnevõrra erineda. E-platvormile 3.0 Evo ehitatud mudelitel ei ole eraldi pardavõimendusseadet, vaid need kasutavad võimendussüsteemi loomiseks mootorit ja elektroonilist juhtimist.
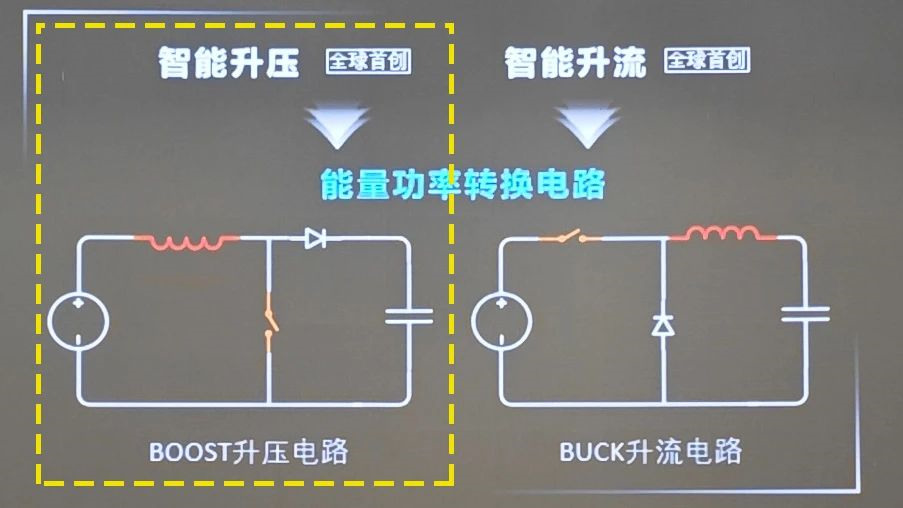
Juba 2020. aastal rakendas BYD seda tehnoloogiat Han EV-dele. Selle võimendamise põhimõte pole keeruline. Lihtsamalt öeldes on mootori mähis ise induktiivpool ja induktiivpooli iseloomustab võime salvestada elektrienergiat ning Sic-i toiteseade ise on ka lüliti. Seega, kasutades mootori mähist induktiivpoolina, SiC-d lülitina ja lisades seejärel kondensaatori, saab kujundada võimendusahela. Pärast seda, kui üldise laadimiskuhja pinget selle võimendusahela kaudu suurendatakse, saab kõrgepinge elektrisõiduk ühilduda madalpinge laadimishunnikuga.

Lisaks on uuel platvormil välja töötatud ka sõidukile paigaldatud vooluvõrku tehnoloogia. Seda nähes võivad paljud inimesed küsida, mis kasu on sõidukile paigaldatud voolu üleslaadimise funktsioonist? Me kõik teame, et avaliku laadimishunniku voolu maksimaalne pinge on 750 V, samas kui riiklikus standardis sätestatud maksimaalne laadimisvool on 250 A. Vastavalt põhimõttele elektrivõimsus = pinge x vool on avaliku laadimishunniku teoreetiline maksimaalne laadimisvõimsus 187kW ja praktiline rakendus 180kW.
Kuna aga paljude elektrisõidukite aku pinge on alla 750 V või isegi veidi üle 400-500 V, ei pea nende laadimispinge üldse nii kõrge olema, nii et isegi kui laadimise ajal saab voolu tõmmata 250 A-ni, ei pea laadimise tippvõimsus ei ulatu 180 kW-ni. See tähendab, et paljud elektrisõidukid pole avalike laadimisjaamade laadimisvõimsust veel täielikult pigistanud.
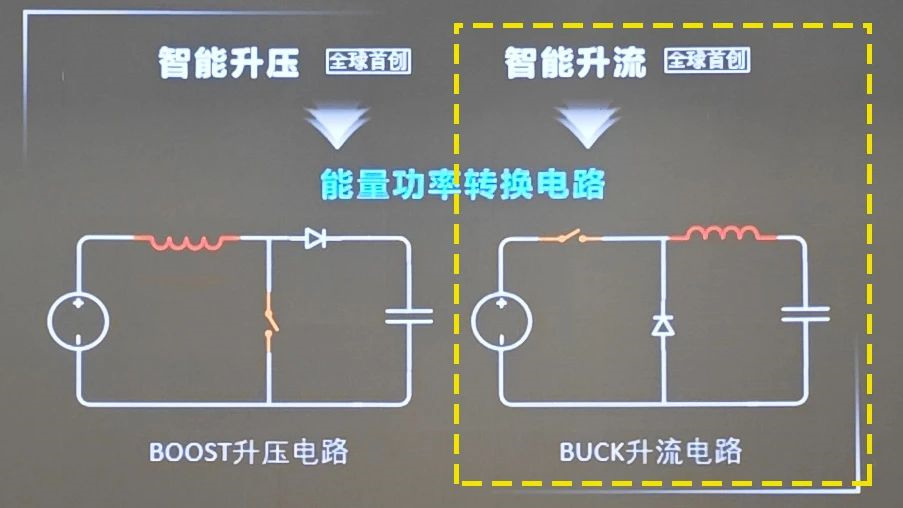
Seega mõtles BYD lahenduse välja. Kuna üldelektrisõiduki laadimispinge ei pea olema 750V ning laadimishunniku maksimaalne laadimisvool on piiratud 250A-ga, on parem teha autole alla- ja vooluahel. Kui eeldada, et aku laadimispinge on 500V ja laadimishunniku pinge on 750V, siis saab autopoolne vooluahel 250V lisapinget alla võtta ja selle vooluks teisendada, nii et laadimisvool teoreetiliselt tõuseb 360A-ni, ja laadimise tippvõimsus on ikka 180kW.
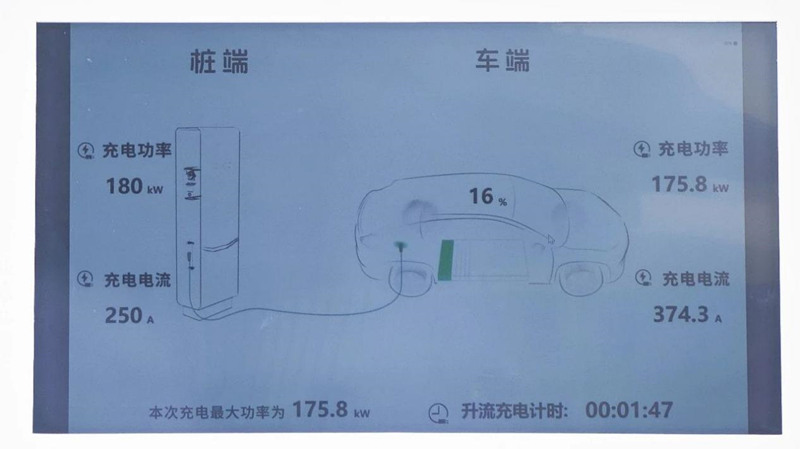
Vaatlesime BYD kuusnurkses hoones ülesvoolu laadimise protsessi. Sea Lion 07EV on ehitatud e-platvormile 3.0 Evo, kuigi selle aku nimipinge on 537,6 V, kuna see kasutab sõidukile paigaldatud voolutehnoloogiat, võib 07EV laadimisvool olla 374,3 A standardse 750 V ja 250 A laadimise korral. kuhjaga ja laadimisvõimsus ulatub 175,8 kW-ni, põhimõtteliselt tühjendades laadimishunniku piirväljundvõimsuse 180 kW juures.
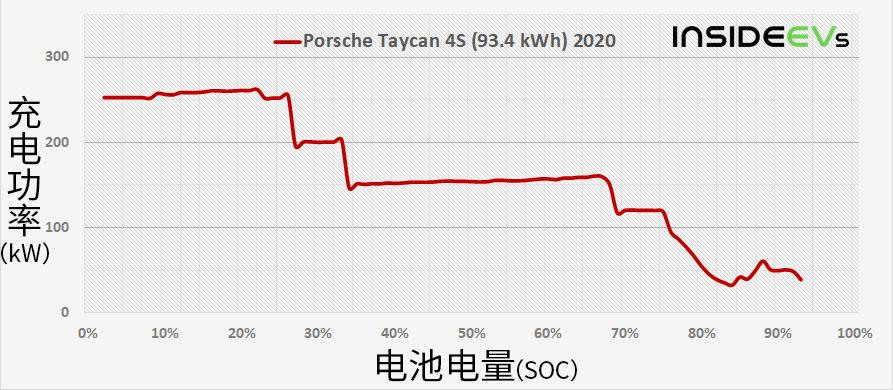
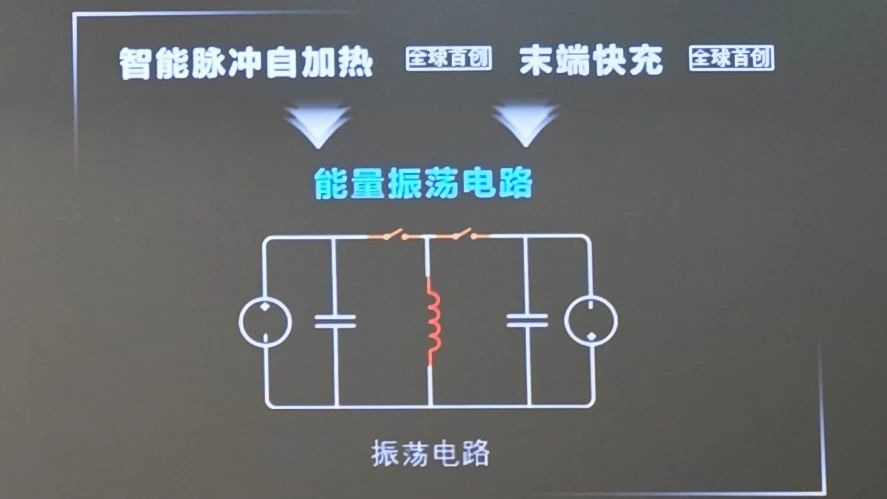
Lisaks võimendusele ja voolule on e-platvormil 3.0 Evo ka teedrajav tehnoloogia, milleks on terminalimpulsslaadimine. Nagu me kõik teame, jääb enamik tänapäeval elektrisõidukite poolt propageeritavast kiirlaadimisest vahemikku 10-80%. Kui soovid täis laadida alates 80%, pikeneb tarbimisaeg oluliselt.
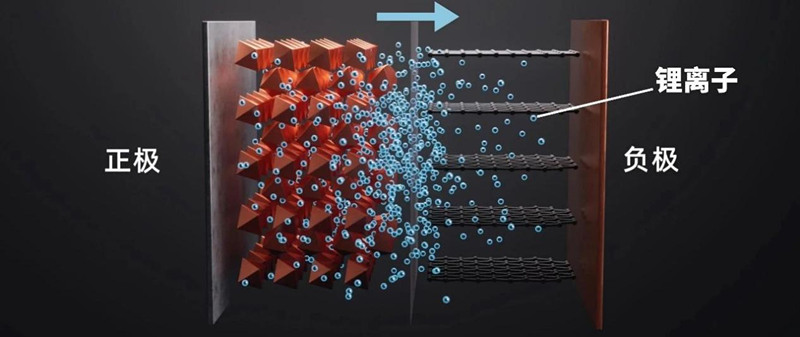
Miks saab viimased 20% akust laadida ainult väga aeglasel kiirusel? Vaatame väikese võimsusega laadimise olukorda. Esiteks väljuvad liitiumioonid positiivselt elektroodilt, sisenevad elektrolüüti, läbivad keskmise membraani ja seejärel sujuvalt negatiivsesse elektroodi. See on tavaline kiirlaadimisprotsess.
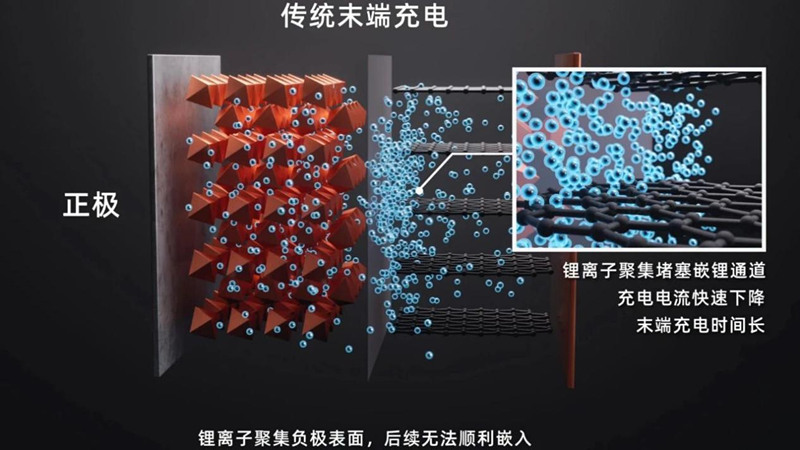
Kuid kui liitiumaku laetakse kõrgele tasemele, blokeerivad liitiumioonid negatiivse elektroodi pinna, muutes selle negatiivsesse elektroodi kinnitamise keeruliseks. Kui laadimisvõimsus kasvab jätkuvalt, kogunevad liitiumioonid negatiivse elektroodi pinnale, moodustades aja jooksul liitiumikristalle, mis võivad läbistada aku eraldaja ja põhjustada aku sees lühise.
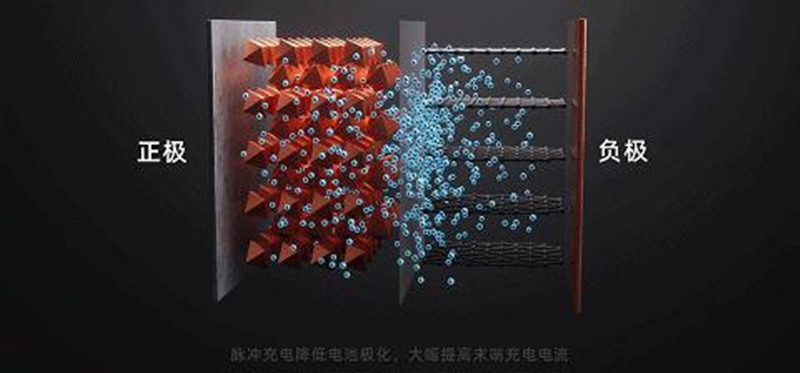
Kuidas siis BYD selle probleemi lahendas? Lihtsamalt öeldes, kui liitiumioonid on negatiivse elektroodi pinnal blokeeritud, ei jätka süsteem laadimist, vaid vabastab veidi energiat, et liitiumioonid negatiivse elektroodi pinnalt lahkuksid. Pärast ummistuse kõrvaldamist sisestatakse negatiivsesse elektroodi rohkem liitiumioone, et viimane laadimisprotsess lõpule viia. Pidevalt vähem ja rohkem tühjendades muutub aku viimase 20% laadimiskiirus kiiremaks. Sea Lion 07EV-l on 80-100% võimsusest laadimisaeg vaid 18 minutit, mis on märkimisväärne edasiminek võrreldes varasemate elektrisõidukitega.


Kuigi BYD e-platvormi on käivitatud alles 14 aastat, on BYD alates 1.0 ajastust esile kerkinud ja võtnud juhtrolli elektrisõidukite uurimis- ja arendustegevuse ning masstootmise lõpuleviimisel. 2.0 ajastul on BYD elektrisõidukid olnud kulude ja jõudluse osas sammu võrra ees ning mõned konstruktsioonid on näidanud arenenud mõtlemist, näiteks Han EV pardaajami süsteemi võimendustehnoloogia, mille on nüüdseks kasutusele võtnud ka kolleegid. 3.0 ajastul on BYD elektrisõidukid kuusnurksed sõdalased, millel pole puudusi aku tööea, energiatarbimise, laadimiskiiruse ja hinna osas. Mis puudutab uusimat e-platvormi 3.0 Evo, siis disainikontseptsioon on endiselt oma ajast ees. Sisseehitatud voolu- ja impulsslaadimistehnoloogiad on tööstuses esikohal. Neid tehnoloogiaid jäljendavad kindlasti ka nende kaaslased tulevikus ja neist saab elektrisõidukite tehniline laba.
-------------------------------------------------- -------------------------------------------------- -------------------------------------------------- -------------------------------------------------- -------------------------------------------------- ----------------------------------


